Actor-Critic Algorithms: Implementation Notes
01 Jan 2019Implementing and understanding actor-critic algorithms
Overview
Actor-critic methods combine the benefits of policy gradient methods (the actor) with value function approximation (the critic). The actor learns a policy, while the critic evaluates states to reduce variance in policy gradient estimates.
The Algorithm
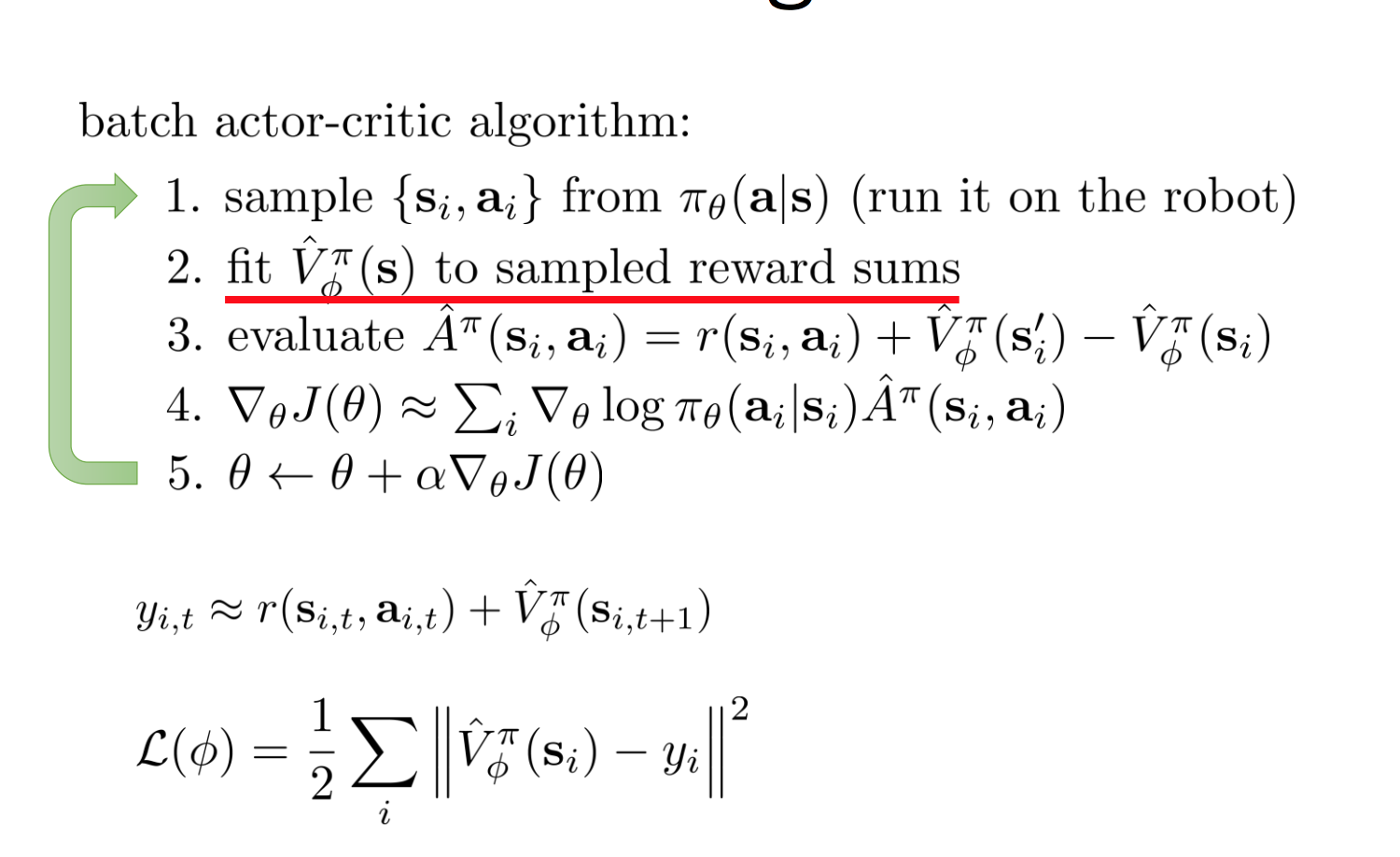
Following Sergey Levine's lecture, the batch actor-critic algorithm works as follows:
Key Components
Actor: The policy network \(\pi_\theta(a|s)\) that maps states to action distributions.
Critic: The value network \(V_\phi(s)\) that estimates expected returns from a state.
Advantage: The advantage function \(A(s,a) = Q(s,a) - V(s)\) tells us how much better an action is compared to the average.
Why Actor-Critic?
- Lower variance: Using a learned baseline (critic) reduces variance compared to REINFORCE
- Online learning: Can update after each step, not just at episode end
- Continuous actions: Works well with continuous action spaces
Implementation: actorCritic.py